机器人工程作为一个高度集成和快速发展的前沿学科,其知识体系呈现出鲜明的“一体多翼”特征。该专业的核心领域明确而集中,旨在培养具备机器人系统设计、制造、集成与应用能力的复合型人才。与此其强大的交叉学科属性决定了它必须与多个关联学科深度融合,才能实现技术创新与工程落地。本文将探讨机器人工程专业这一核心领域与八个关键关联学科之间的关系,并特别聚焦于网络工程的设计与施工在其中扮演的关键角色。
一、 核心领域:机器人系统集成与智能控制
机器人工程的核心,简而言之,是围绕“感知-决策-执行”这一闭环,构建智能、自主的实体系统。其核心知识模块通常包括:
1. 机械结构与设计:作为机器人的“骨骼”与“身体”,涉及机构学、材料力学、精密机械设计等。
2. 感知与传感技术:相当于机器人的“感官”,包括视觉、力觉、触觉、激光雷达等多种传感器的原理与应用。
3. 运动规划与控制:机器人的“小脑”和“脊髓”,负责将决策转化为精确的关节或轮式运动,涉及自动控制理论、伺服驱动技术等。
4. 人工智能与决策:机器人的“大脑”,涵盖机器学习、计算机视觉、路径规划、人机交互等,赋予机器人理解和适应环境的能力。
这个核心领域要求学生不仅掌握理论,更要具备将机械、电子、信息、控制等技术模块集成为可运行、可协作的完整系统的工程实践能力。
二、 八大关联学科:支撑核心的协同网络
机器人工程的深度与广度,依赖于其与众多学科的紧密关联。典型的八个关键关联学科包括:
- 计算机科学与技术:提供算法、软件框架、操作系统(如ROS)和计算硬件的支持。
- 电子工程与微电子:负责嵌入式系统、电路设计、芯片(如MCU, FPGA)和功率驱动。
- 自动化与控制科学:奠定反馈控制、系统辨识、优化理论等理论基础。
- 机械工程:提供扎实的机构设计、动力学分析、制造工艺基础。
- 人工智能与数据科学:驱动智能感知、认知与决策的前沿发展。
- 材料科学与工程:关乎机器人本体的轻量化、高强度及特种功能材料应用。
- 数学与物理学:提供建模、分析、仿真所需的数理工具和基本原理。
- 网络工程:这是实现机器人,特别是现代协作机器人、工业互联网机器人和服务机器人,从单体智能走向群体智能和云端智能的关键桥梁。
三、 网络工程的设计与施工:赋能机器人系统的“神经网络”
在机器人工程的应用场景中,网络工程的设计与施工已从辅助角色转变为关键基础设施。其作用主要体现在:
1. 设计层面:架构与协议
通信架构设计:根据机器人应用场景(如工厂车间、仓储物流、户外巡检、家庭服务),设计局域网(LAN)、无线局域网(WLAN)、5G专网甚至卫星通信网络架构,确保机器人节点间的可靠、低延迟通信。
协议选择与优化:针对机器人控制指令、传感器数据流、视频流等不同数据类型和实时性要求,选用或定制合适的网络协议(如TCP/IP, UDP, ROS中的通信机制,或时间敏感网络TSN),优化数据传输效率与确定性。
* 云端协同设计:设计机器人本体与边缘计算节点、云平台之间的数据管道,支持远程监控、数据收集、算法更新和群体协同计算(如云化SLAM、集中式任务调度)。
2. 施工层面:部署与运维
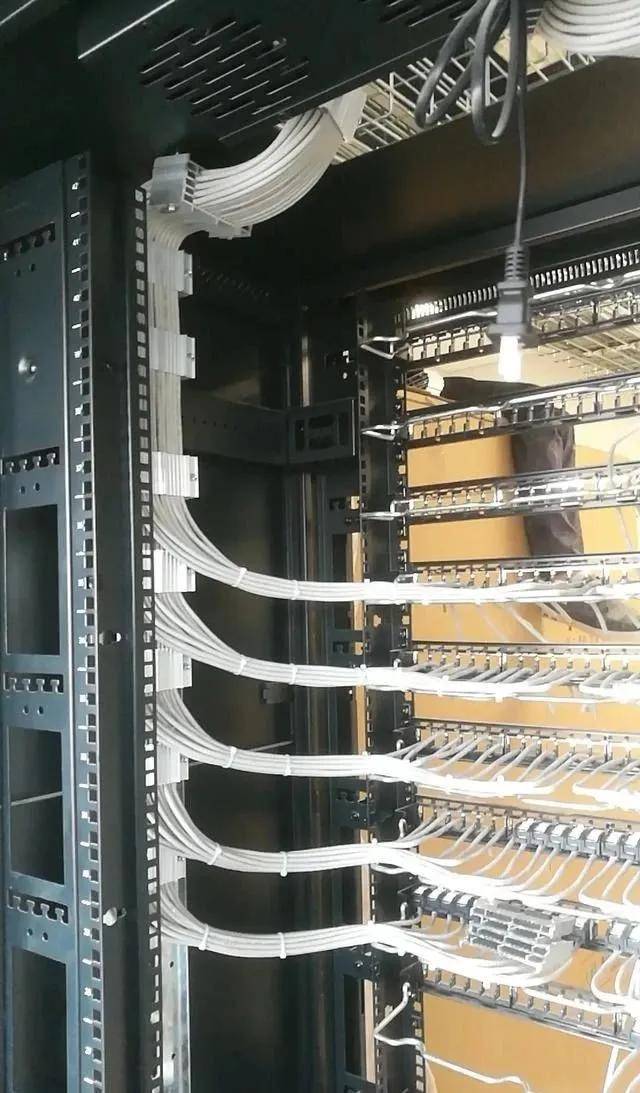
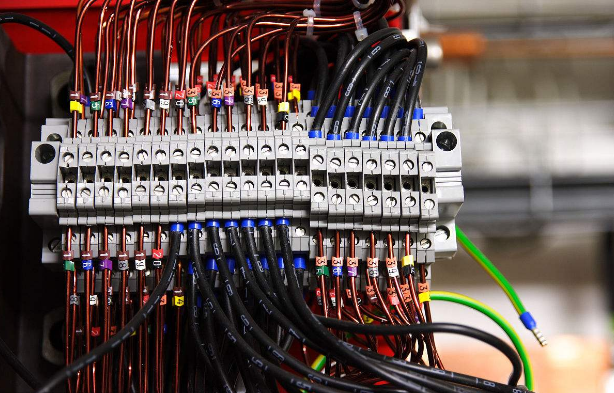
物理链路部署:在工业或特定环境中,合理布设光纤、网线(考虑抗干扰)或部署无线接入点(AP),确保信号全覆盖与稳定性,满足移动机器人的漫游需求。
网络安全加固:机器人系统联网后,面临数据泄露、非法入侵、指令篡改等风险。网络施工必须集成防火墙、入侵检测、数据加密(如TLS/SSL)和访问控制策略,构建纵深防御体系。
实时性与可靠性保障:通过服务质量(QoS)配置、网络冗余设计(如环网)、精确时钟同步(如PTP协议)等施工与调试手段,满足工业机器人控制、多机协作等场景对网络性能的苛刻要求。
运维与监控:建立网络性能监控系统,实时监测带宽、延迟、丢包率等指标,为机器人系统的稳定运行和故障快速定位提供支撑。
结论
机器人工程专业以“系统集成与智能控制”为核心,如同一个精密的“机体”。而包括网络工程在内的八大关联学科,则是支撑这个机体高效运转的“器官”与“脉络”。其中,网络工程的设计与施工,正以前所未有的重要性,为机器人构建起强大、可靠、安全的“神经网络”。它使得机器人能够突破单体能力的限制,实现数据互通、算力共享、任务协同,最终迈向真正的智能化、网络化、集群化时代。因此,对于现代机器人工程师而言,理解并掌握网络工程的相关知识,已成为设计和部署先进机器人系统不可或缺的核心竞争力之一。